欢迎光临小九足球直播官网!



您可能认为这种不稳定振荡由过快的控制带引起,因此您减小比例积分 (PI) 控制器的比例增益 (Kp) 和积分增益(Ki),并明显降低交叉频率。振荡就会消失。
但这是最佳解决方案吗?较低的电流环路带宽会降低控制速度,但您可能会发现总谐波失真 (THD) 测试将会失败。有时,当源阻抗大一些时,振荡会再次出现。
这种不稳定性是否可能有其他原因?如何以足够的相位裕度实现最佳控制带宽?下面我们来详细分析一下数字控制环路,从而了解这一潜在的错误是如何引入的。我们还将向您展示如何检查控制固件中出没出现这种不稳定性。
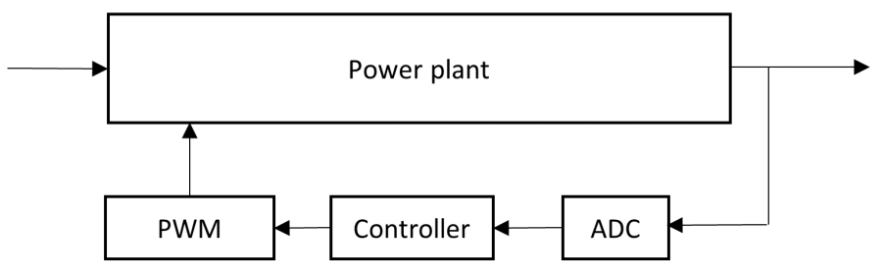
控制环路包含一个模数转换器 (ADC)用于进行对象电流/电压采样,一个数字控制器用于生成调整值,以及一个脉宽调制器 (PWM)用于执行调整,可通过更改占空比或频率来改变目标电流/电压。
开关模式电源 (SMPS) 中的 ADC 采样通常位于两个开关周期的中间点,这样不但可以避免开关产生的噪声干扰,还能获取连续导通模式 (CCM) 下功率电感器的平均电流值。
数字控制器在中断服务例程 (ISR) 中进行计算,可以与 PWM 输出同步触发。触发事件可以是以下事件之一:PWM 的“COUNTER”等于“ZERO”、“PERIOD”或特定的值“CMP”。
控制器完成所有计算时无法立即更新 PWM,但 PWM 寄存器必须在一个专门时刻由影子寄存器加载,如 PWM 计数器等于“ZERO”或“PERIOD”时。如果 PWM 值在计数器上升或下降过程中发生明显的变化,则很可能会产生错误的 PWM 动作,导致脉冲丢失或脉冲重复。
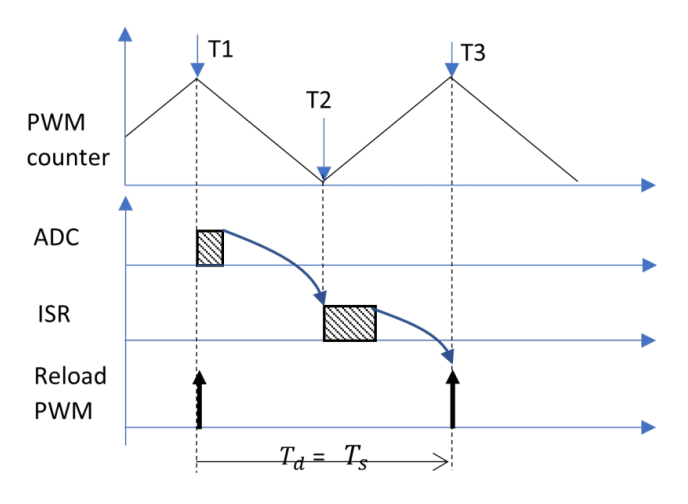
与模拟控制管理系统不同,数字控制按照采样频率来执行,并且从采样到 PWM 重新载入新值必须有一个延迟时间 (Td)。PWM 修改通过调整翻转时刻来实现,翻转时刻在单边沿调制时(递增/递减模式)发生一次,在双边沿调制时(先递增后递减模式)发生两次。因此,最小Td将会是一个开关周期Ts(如图 3a 所示),或半个开关周期Ts/2(如图 3b 所示),具体取决于您选择的调制重新加载频率。
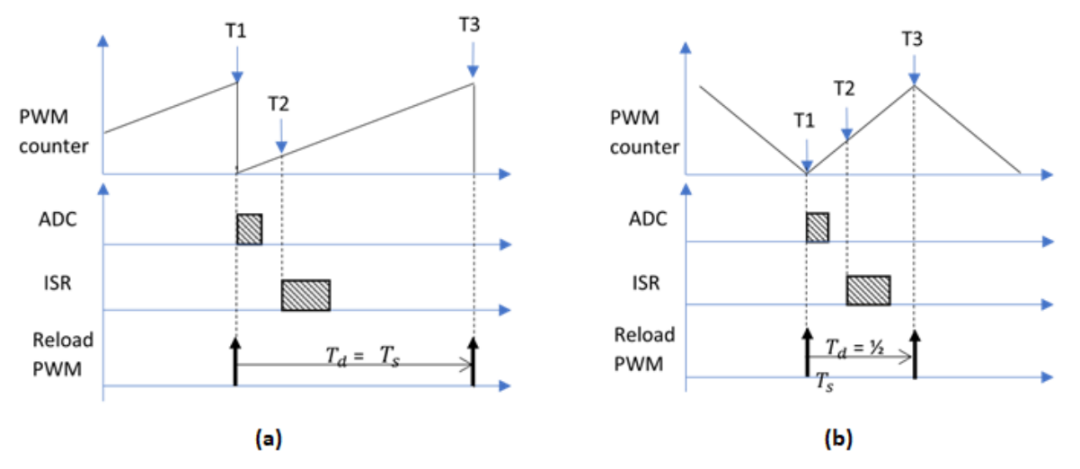
图 3. 最小延迟时间通过 PWM 调整而引入(a) 向上计数模式,(b) 上下计数模式
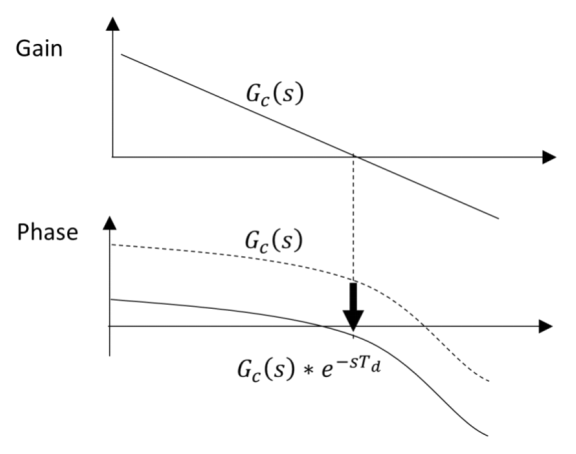
如图 4 所示,Td在其传递函数中表示为e-sxTd,这将减少相位裕度。当然,当相位裕度小于 45 度时,系统将变得不稳定,并会发生振荡。
在正确执行的情况下,最小Td为一个开关周期Ts或半个开关周期Ts/2。但是,如果未考虑 ADC、ISR 和 PWM 重新加载的后果,则将控制延迟扩展到高于一个开关周期可能会减小相位裕度,导致不稳定。
例如,在图 5 中,当 PWM 计数器等于零,ADC 的 ISR 触发和 PWM 重新加载会同时启动。
尽管所有块都同时执行,但在这样的一种情况下,您是不是能够预期Td为零?当然不能!
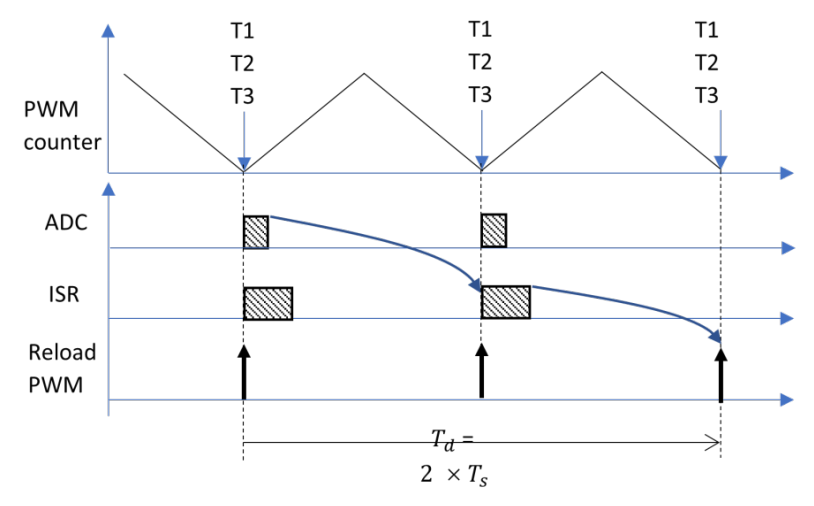
这是因为 ADC 转换和 ISR 计算所需的时间远超一个 MCU 时钟周期,当 ISR 读取 ADC 结果时,ADC 转换仍未完成。因此,ISR 将获取“旧”采样值进行计算,而最新值的计算将延迟到下一个开关周期。ISR 计算完成后,新 PWM 值仅写入影子寄存器中,随后将在下一个开关周期中重新加载。实际上,Td的总控制延迟将为两个开关周期,即2 x Ts。
除了此处所示的示例之外,其他实现方案也有一定可能会引入类似的扩展控制延迟,例如,在 ISR 代码中将 ADC 值读取放在控制器计算之后,或者在计算控制器之前添加 N 周期算法平均值。
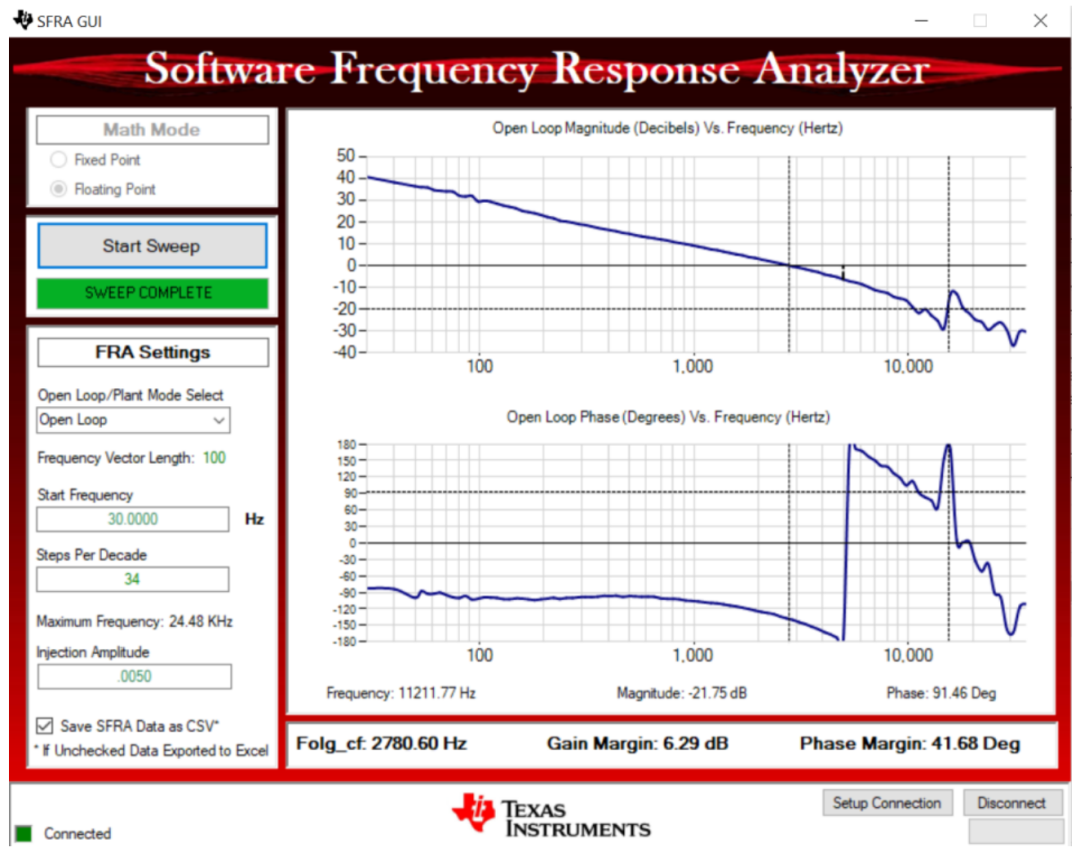
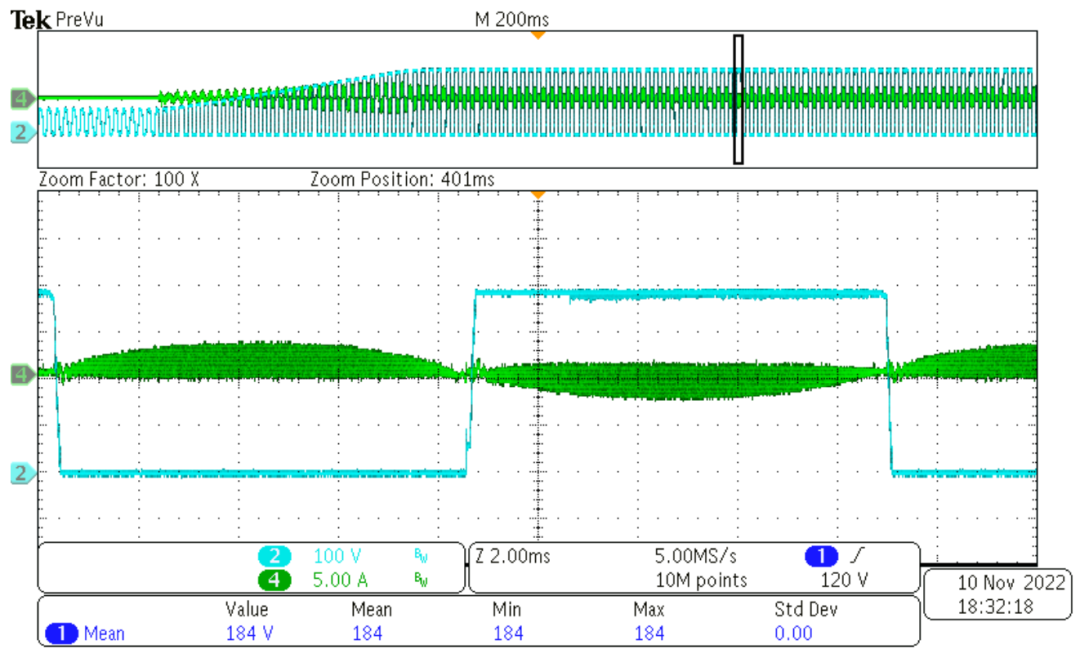
如图 6 所示,在图 5 的错误实现中,如果将 GAIN 交叉频率设置在 3kHz 左右,则相位裕度为 41.68 度。此值小于 45 度,并且扼流电流有明显的振荡,比如图 1 的波形,因此您被迫将交叉频率降至低于 2kHz;然后 iTHD 更差,不足以满足要求。
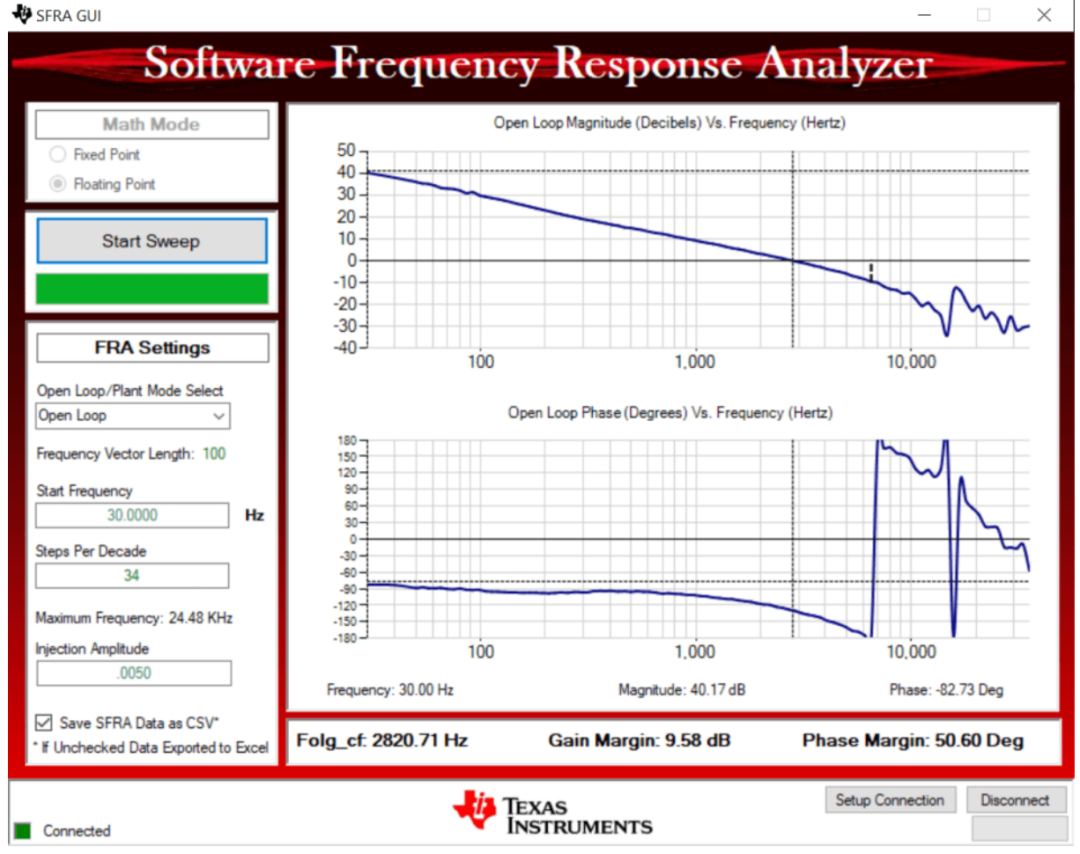
控制延迟将减少为一个开关周期。相位裕度明显地增加,电流振荡消失,如图 8 和图 9 所示。
在数字实现中,从 ADC 采样到 PWM 调整的控制延迟将减小相位裕度并导致振荡。解决该问题时,应考虑 ADC 采样、控制器计算和 PWM 重新加载的后果。组织有序的控制方案可以将延迟尽可能减少到半个或一个开关周期,从而增加相位裕度和环路带宽。

