欢迎光临小九足球直播官网!



系统中发挥着至关重要的作用。随着高频开关 电源 技术的进步,它不仅改善了传统电路的外观和结构,而且大幅度提升了部分电源的回收 效率。节省材料,降低成本。
逆变器是电力电子技术发展中早期使用的一种DCAC(直流/交流)转换装置。逆变器是一种将直流电转换为交流电同时还提供控制逻辑的装置。 逆变器 通常用于家庭电器中。逆变器的外形和安装方法顺应市场发展的新趋势,正在向小型化、智能化、模块化方向发展。
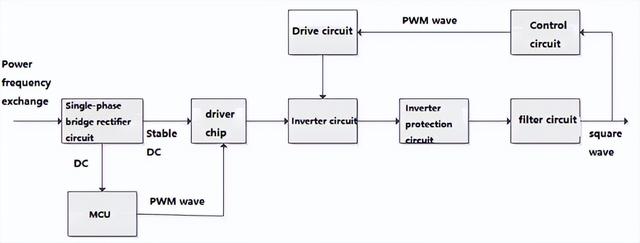
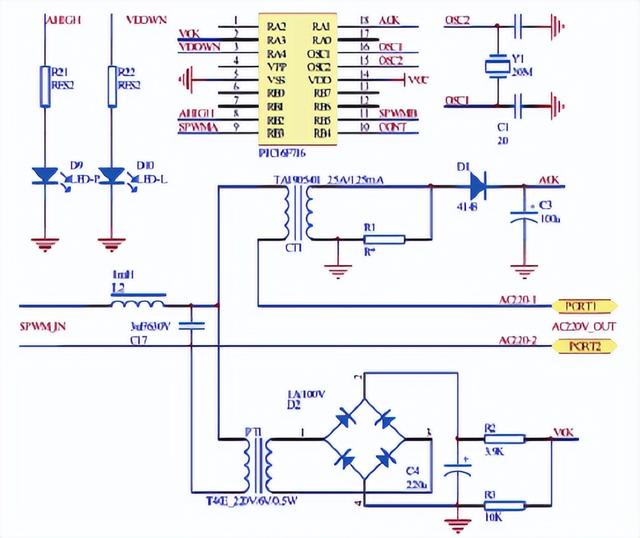
220V工频电压最初输入到本文小型逆变系统的终端,然后由降压变压器输出24V交流 电压 。单相桥式整流电路、两个稳压电路和其他几个电路都有助于输出 24V 交流电压。经过二极管滤波后提供两路稳定的直流电压(15V和5V),为单片机。同时, 将程序在线串行编程到单片机中后产生的PWM (脉宽调制)波促使两个驱动芯片产生两相四通道 PWM 波,产生互补的高通和低通信号。驱动适当的MOS(金属氧化物半导体场效应晶体管的缩写)管后,构成电压型全桥逆变电路。最后,负载检验测试生成的互补矩形波;输出电压为220V、50Hz交流电压,最大输出电流为2.5A,最大输出功率不小于100W。 整个逆变器流程如上所述完成,系统模块设计框图如图1所示图表。
美国国际整流器公司生产IR2110驱动芯片(现已被英飞凌公司收购 )。它具有光耦隔离和电磁隔离特性。它以其体积小、速度快而成为大多数中小型功率转换装置中的驱动装置。
驱动芯片 IR2110的内部功能结构 由三个主要部分所组成:电平转换、逻辑输入和输出保护。IR2110驱动芯片的各种优点 是系统电路构建和设计元件能避免许多问题的原因。例如,在高压浮动自举 电源 电路的设计中,一组电源有效地控制高低端口,将额外的驱动电源数量减少到最少。
图2为IR2110驱动芯片的驱动半桥电路 ,这是对高端侧悬架驱动电路自举原理的简单说明。C1和VD1分别是自举电容和自举二极管,C2是电源电压Vcc的滤波电容,如图所示。
首先,预计当S1关断时,自举电容C1能够承受 VC1 Vcc的电压。VM1导通,VM2截止,在HIN为高电平时,在S1的栅极和源极-发射极之间施加VC1电压。然后自举电容 C1 通过 Rg1、VM1、栅极和源极形成回路进行放电,使 VC1 等于电压源并触发 S1 导通。另一方面,HIN 和 LIN 之间的信号被认为是互补输入。当 LIN 为低电平时,VM3 被禁用,VM4 被启用。此时电荷通过S2栅极中的Rg2和源极内部的芯片快速释放到地。电是一种能源。此时死区时间对其产生影响,导致S2在S1开启之前关闭。
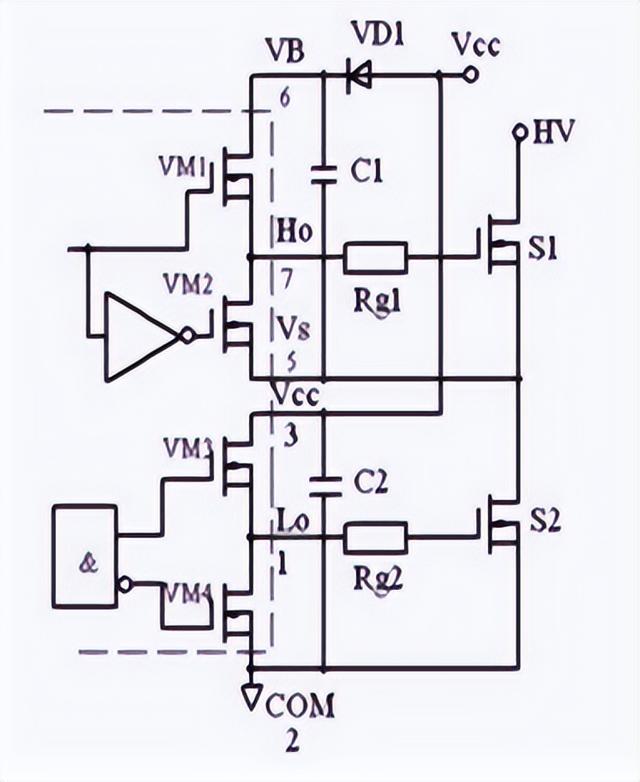
当HIN为低电平时,VM1关闭,VM2开启。此时,S1栅极中的电荷将通过Rg1和VM2快速放电,导致S1关断。经过短暂的死区时间(td)后,LIN上升到高电平,导致S2导通,电源电压 Vcc 通过S2和VD1对自举电容C1充电,导致自举功率快速增加电容器C1。重复这个循环。
图 3 是IR2110逆变器的示意图 。IR2110驱动芯片U3和U4就是其中的两个。Q1、Q2、Q3、Q4使用四个MOS晶体管。PIC16F716微控制器驱动器的 输出为 Ua、Ub、Va 和 Vb。一相PWM波的上下臂 为 Ua 和 Ub,Va 和 Vb 为另一相PWM波 的上下臂 ,如图所示为两相四路 PWM 波芯片引脚。驱动芯片的输出由 PIC16F716 微控制器触发。由于部分 PWM 波无法驱动大功率MOS管,因此二极管D9和D15(利用肖特基管的快恢复功能)必须依靠IR2110中的电容自举功能来增加电容充电。对自举电容C11、C12、C16、C17充电,以提高驱动MOS管的信号端电压,使其具有升压信号端输出的功能,从而提高MOS管的信号端电压Q1、Q2、Q3 和 Q4 可以使用PWM波不断地打开和关闭 。进一步地,逆变电路中同相上下臂的驱动信号是互补的。
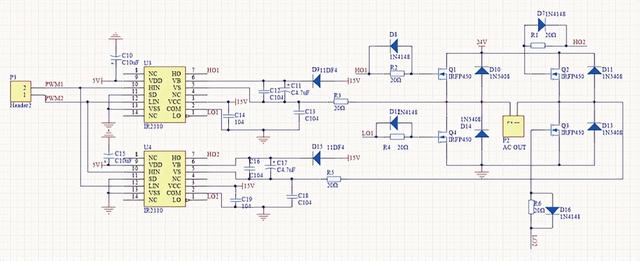
由图3可知,当Ua为高电平时,输出端HO1同样为高电平,从而使IR2110芯片的电容自举功能能够调节MOS管Q1的开路。同时,由于输出端LO1为低电平,MOS管Q4处于截止状态,无法驱动。同时Vb也输入高电平,表示输出端LO2处于高电平状态,之后MOS管Q3导通,Q2截止。结果,通过 HO1 Q1 P2 Q3 GND 构建了一条路径。当Ua、Vb为低电平状态,Ub、Va为高电平状态时,电流流过HO2 Q2 P2 Q4 GND的路径,开关器件(4个MOS管)导通和截止依次交替,从而在P2(负载端)位置形成交流电。由于芯片上下臂同时导通产生的短路在实际应用中很常见,因此在软件设计过程中增加了额外的死区时间,以防止短路,保护整个电路的正常工作。
Microchip的 PIC 系列微控制器具有集成多个外围模块、性能稳定、硬件系统架构简单、功耗低等优点。因此, 本研究选择PIC16F716单片机作为逆变器的主控制器。这些特性大大降低了电路构建成本,因为 PIC16F716 微控制器不需要额外的A/D(模拟/数字)转换芯片,并且包含四个8位A/D转换通道。
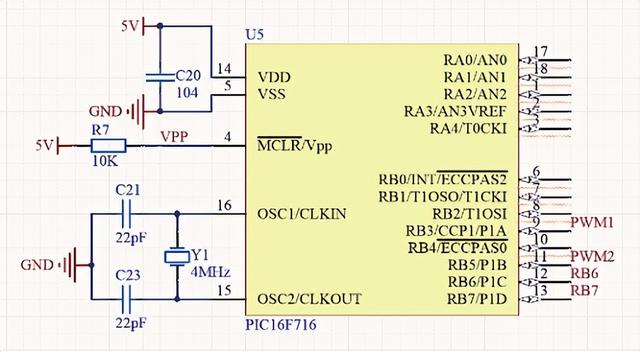
同时, PIC16F716 单片机还包括内置上电延迟定时器(DWRT)、双阈值欠压复位电路、可编程代码保护、上电复位电路(POR)、看门狗定时器( WDT)、振荡器启动定时器(OST)、片上 RC 振荡器、 在线串行编程 (ICSP)等。这些功能品质可以降低单片机上电路器件的成本和外部器件的数量,从而使整个系统设备尺寸更小,在实际应用中具有显著的成本效益。在该系统架构中, PIC16F716微控制器采用具有增强型PWM模式 的半桥输出拓扑 (即微控制器可以提供从P1A到P1D的四个输出)。大多数情况下,只需两个引脚即可实现半桥输出模式。
输出用于驱动推挽负载。图4为PIC16F716单片机小型系统的外围电路引脚图 ,其中半桥臂通常由RB1和RB2控制(通常使用可编程死区来达到延迟目的,以避免射击)通过半桥输出模式下大功率器件的现象),RB5/P1B引脚为 PWM 波输出信号,RB3/CCP1/P1A引脚为互补 PWM 波。此外,IR2110芯片驱动输出信号。
本研究逆变电源设计中包含了保护电路,如图5所示。当逆变输出电流达到2.5A时,过流电流ACK超过4.5V,SPWM芯片检测到ACK超过2.5V 。 V、逆变器保护动作,LEDP灯闪烁。除此之外,LED L 灯闪烁。LC电路由输出滤波电路选择,其设计参数如下:L=1mH,C=3uF,截止频率为2.5kHz。
在本研究中,我们展示了PIC16F716单片机的增强型捕获/比较/PWM模块(因此称为ECCP模块)如何快速实现两路输出互补对称PWM波。只要正确设置ECCP模块工作模式下的寄存器CCP1CON、周期寄存器PR2和脉宽寄存器CCPR1L三段的值,就可以产生所需的PWM波。该模块有全桥、半桥等多种工作模式可供选择。本软件设计中信号极性设置为高电平有效,采用半桥模式。半桥输出模式下,两个引脚用作输出驱动推挽负载:RB3 引脚发送 PWM 输出信号,RB5 引脚输出互补的 PWM 直通输出信号。此外,在半桥输出模式的情况下,可编程死区时间延迟能够尽可能的防止半桥电路中的现象。
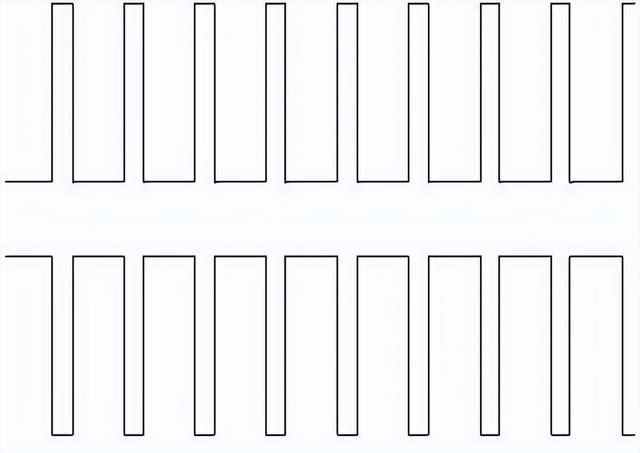
为了生成PWM波,必须确定两个参数:PWM波的周期T和PWM波的脉冲宽度Twidth。根据设计的基本要求,PWM 波的频率必须为 50 Hz,占空比为 30%。周期T=1/F=1/50=20ms;脉冲宽度 Twidth = 20 ms X 30% = 6 ms;然后,依据相应的公式,可以计算出周期寄存器PR2的初始值和脉宽寄存器CCPR1L的初始值。
将软件上传到单片机后,打开测试,使用双迹示波器测量RB3和RB5的输出波形,如图6所示。信号的大小和方向随时间频繁变化,如图,满足逆变器。考虑到标准交流信号的特性后,结果符合逆变电路的要求。
本文将逆变电路理论与单片机技术相结合,最终实现了一种基于SPWM技术的独立逆变 电源 的设计。实验证明,通过软件编程,能轻松实现单片机控制芯片PIC16F716的PWM模块的输出功能,实现SPWM波序列的输出。
本工作中的逆变电路设计为全桥电路。采用Microchip PIC16F716芯片完成全桥逆变过程中SPWM专用芯片的设计,不仅简化了系统电路,而且提高了电路效率,实现了电路高频化和结构小型化。整流逆变器实物图如图7所示。

最好。同时也欢迎有POS设备、条码设备方面开发经验的工程师发邮件给我商谈看有无合作机会。对此我们将严守保密,如有意向者请发邮件给我,我将及时回复:谢
芯片HO、LO输出的波形都是互补的,想经过控制SD的开通和关断来使HO、
芯片HO、LO输出的波形都是互补的,想经过控制SD的开通和关断来使HO、
感应加热电源是主流的研发设计方向,也是很多工程师的工作重点。在今天的文章中,我们将会为大家分享
应用电路 /
驱动电路 /
的原理和扩展应用 /
简约型高端浮动供电模式,满足一般PWM控制需要。在基于TMS320LDF2407A为控制器、
的H桥可逆PWM驱动电路应用 /
的特点和内部功能图及应用电路图 /
内部结构和特点,其次介绍了高压侧悬浮驱动的自举原理与自举元器件的分析与设计,最后介绍了

